
Since the 1950s, robots have been getting closer to us. Will cohabitation change into “incarnation”?
Louis-Philippe Demers, via ARS Electronica on Flickr, CC BY-NC-ND
Ganesh Gowrishankar, Montpellier University
Our society is changing. More and more, we welcome a new species among us. The robots.
Developing interactions between humans and robots is not only a robotic challenge but also a challenge to understand humans and human society: how humans perceive robots, communicate with them, behave around them and accept them (or No). This becomes all the more important with the arrival of the fourth generation of robots, which integrate directly into the human body.
We are working to better understand what is called the “embodiment” of these devices: indeed, as these robots come to “be one” with us, they modify our behaviors and our brains.
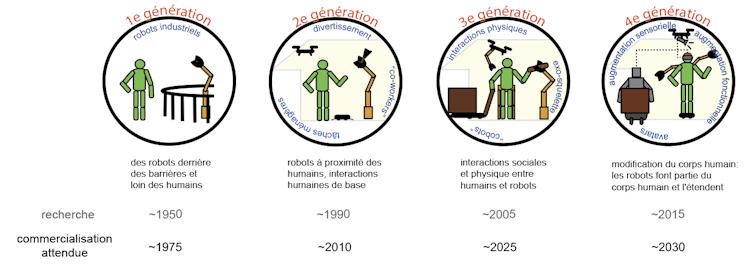
The first generation of human-robot interactions, for industry
This “time travel” of robots, transformed from the status of dangerous machines to that of an integral part of human society, has lasted for more than forty years.
The robots are very varied, by their sizes (micrometric or even nanometric on one side, but human size or more on the other), their ways of moving and their functionalities (industrial, spatial, defense for example). Here, I am not focusing on the robots themselves, but on the interactions between humans and robots which I believe have developed over four generations.
Ganesh Gowrishankar, Provided by the author
Large-scale human-robot interactions began with the arrival of industrial robots, the first of which was introduced by General Motors in 1961. These slowly spread and by the early 1980s industrial robots were present in the United States, Europe and Japan.
These industrial robots made it possible to observe the first generation of human-robot interactions: they generally operate in demarcated areas, to ensure that humans do not approach them, even by mistake.
Industrial robots, which were first popularized by automobile assembly tasks, are now used for various tasks, such as welding, painting, assembling, dismantling, pick and place for printed circuit boards, packaging and labeling.

Spencer Cooper/Flickr, CC BY-ND
Work side by side
Robotics research from this period focused on bringing robots closer to humans, resulting in a second generation of human-robot interactions, materialized for the general public in the early 2000s, when machines , like the Roomba and the Aibo, have started entering our homes.
These second-generation robots work in close proximity to humans in our homes and offices for “service applications”, such as cleaning floors, mowing lawns and cleaning swimming pools – a market worth around $13 billion. US in 2019. In 2009, there were approximately 1.3 million service robots worldwide; a number that had increased by 2020 to around 32 million.
However, although these robots operate in a more human environment than industrial robots, they still interact in a fairly minimal and basic way. Most of their daily tasks are independent tasks, which require little interaction. In fact, they often even try to avoid interaction with humans – which isn’t always easy.
Interact with humans
The relationship between humans and robots is now gradually evolving towards the third generation of interactions. Third-generation robots have the ability to interact cognitively or socially like so-called “social” robots, but also physically like exoskeletons.
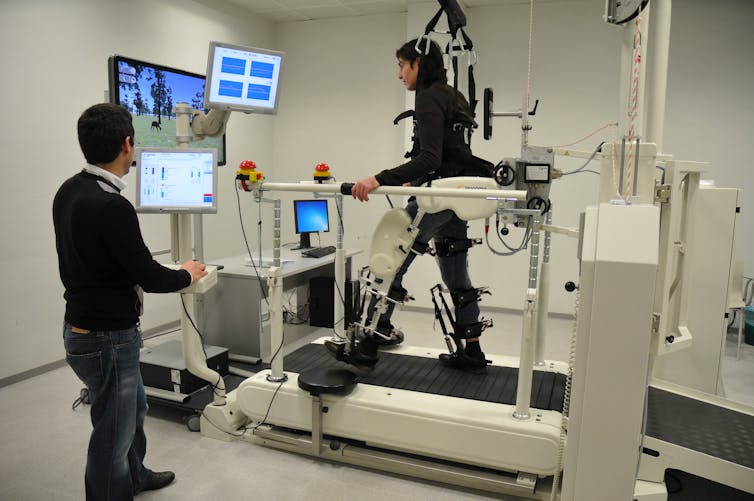
Santa Lucia Foundation, CC BY-NC-SA
Robots capable of physical assistance, which might be used for rehabilitation and care of the elderly, social assistance and security, have also been clearly identified as priorities by governments in Europe, the United States as well as in Japan from the mid-2010s.
One way in particular to respond to the problem of aging populations in these developed countries.
Challenging the definition of the human body
We are now slowly seeing the emergence of a fourth generation of human-robot interactions, in which robots are not only physically close to humans, but well connected to the human body itself. Robots become extensions of the human body.
This is the case of functional augmentation devices – such as supernumerary robotic limbs – or even functional replacement devices such as robot avatars (which allow humans to use a robot body to make them realize specific tasks). Other devices can also provide additional sensory perception to humans.

Yoichi Miyawaki/Sixth finger Project, Provided by the author
Fourth generation interactions are fundamentally different from other generations because of one crucial factor: before this generation, human and robot are clearly defined in all their interactions by the physical boundaries of their respective bodies, but this boundary becomes blurred. in fourth-generation interactions, where robots modify and extend the human body in terms of motor and sensory abilities.
In particular, the interactions of the fourth generation should interfere with these “body representations”. It is known that there are specific representations of our body in our brain that define how our brain recognizes our body. These representations determine our cognition and behaviors.
For example, imagine you are shopping in a crowded grocery aisle. While reaching for items with your right hand, you are able, very implicitly and without even realizing it, to avoid colliding with your left arm with other shoppers.
This is possible because your brain has a representation of the size, shape of your limbs and is aware of and monitors each of your limbs. If you’re holding a basket in your arm (which changes the size and shape of the “arm”), you’ll find it harder to instinctively avoid collisions, and will have to make a conscious effort to keep the basket from hitting anything around you. close.
In the same way, can our brain adapt to a supernumerary member, or other fourth-generation robotic addition, and update its bodily representations? This is called “embodiment” in neuroscience.
If the embodiment of these devices can happen, how fast does it happen? What are the limits of this incarnation? How does this affect our behavior and the brain itself?
Fourth-generation human-robot interactions not only challenge the acceptance of the machine by the user’s brain, but also the acceptance of the user in society: it is still unclear whether our society will , for example individuals with additional robotic arms. It will certainly depend on cultural aspects that we are also trying to analyze.
In fact, third- and fourth-generation robots are so close to humans that we need to better understand human behaviors and our brains to develop them.
In our work, we therefore combine research in robotics with cognitive, motor and social neuroscience, to develop what we believe to be the science of human-machine interactions.
Only through a holistic understanding of human individuals, the machines that interact with them, and the society in which they live, can we develop future generations of robots. And, in a sense, the society of the future.![]()
Ganesh Gowrishankar, Researcher at the Computing, Robotics and Microelectronics Laboratory of Montpellier, Montpellier University
This article is republished from The Conversation under a Creative Commons license. Read the original article.